
Это экономит стоимость, вес и пространство, а также делает систему более надежной, поскольку уменьшается физическое количество проводов и соединений.
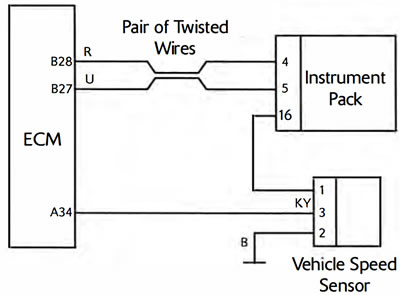
Выдержка из принципиальной схемы, показывающая соединение CAN между модулями ECM
CAN работает, когда каждый ECM отправляет «пакеты» информации. (например, информация о частоте вращения двигателя или расходе топлива) на сетевую шину (обратите внимание, что сеть должна быть свободна от данных, прежде чем будет разрешена передача любого ECM. Этим данным отдается приоритет в зависимости от их важности (например, «обороты двигателя» могут иметь более высокий приоритет, чем «низкий уровень топлива»), поэтому даже если два модуля ECM отправляют данные одновременно, информация с высоким приоритетом всегда отправляется первой. Данные с более низким приоритетом затем пересылаются повторно после того, как данные с высоким приоритетом были получены всеми модулями ECM в сети.
Принимающий модуль ECM подтверждает, что данные были получены правильно и что данные действительны, и эта информация затем используется ECM по мере необходимости. Конкретные данные, не требуемые ECM, все равно будут получены и признаны правильными, но затем проигнорированы (например, если ECM не требует информации о положении переключателя сцепления, этот пакет данных будет игнорироваться).
Это позволяет создать очень высокоскоростную систему связи, которая также очень надежна. Если один ECM выйдет из строя или передаст поврежденные или иным образом неправильные сообщения, это не повлияет ни на один из других ECM в сети, и через определенное время этот ECM не сможет передавать дальнейшие сообщения до тех пор, пока неисправность не будет устранена. Это не позволяет ECM засорять сеть неверными данными и препятствовать прохождению других сообщений. В этом случае о неисправности будет сообщаться диагностическим кодом неисправности DTC).
В настоящее время Triumph использует CAN для связи между ECM двигателя и приборами.